Aquesta és la història recent de com uns pocs investigadors, il·lusionats per millorar la societat en què viuen, generen un impacte positiu d’interès per a la comunitat científica, en contacte directe amb el nostre Mare Nostrum, des de la Universitat Jaume I (UJI) a Castelló. Si l’UJI es funda en 1991, una dècada després es posa en marxa el que seria el nucli del grup IRS-Lab. Inicialment, la línia de treball s’orientava cap a les interfícies home-màquina d’una banda i, d’una altra, cap a la robòtica de serveis.
Durant 2007 s’organitza a Roma el congrés més important del món en el context de robòtica (ICRA’ 07). En una trobada casual de qui subscriu amb un col·lega entranyable de la Universitat de Girona, investigador entusiasta en el desenvolupament de nous vehicles submarins, cristal·litza una col·laboració en el context de la robòtica submarina que no ha cessat des de llavors. Així, en 2008, presentem una proposta conjunta al Ministeri, i coordinada per qui subscriu, que seria finançada per al trienni 2009-11. Aquest primer projecte, anomenat RAUVI, seria el nucli per a impulsar una proposta europea en el setè programa marc, la qual va resultar avaluada positivament (FP7-TRIDENT). Una estada d’investigació a Itàlia va ser determinant per a aconseguir el suport d’alguns dels investigadors de més reconegut prestigi en aquest context i, així, impulsar la proposta europea que donaria lloc a TRIDENT. Al final, amb un consorci molt potent de quatre països (Espanya, Itàlia, Portugal i Regne Unit) aquest projecte, liderat per qui subscriu des de l’IRS-Lab, va estar actiu des del 2010 fins al 2013.
Cal dir que, en essència, tant RAUVI com TRIDENT exploren vies de progrés en la mateixa direcció: el denominat problema de «cerca i recuperació», injectant el coneixement adequat i desenvolupant les tecnologies necessàries per a obtindre un nou vehicle d’intervenció amb la màxima autonomia possible. Per a poder prendre les seues pròpies decisions, el vehicle d’intervenció ha de garantir la percepció adequada del seu entorn, en qualsevol circumstància, i ser capaç de reaccionar de manera dinàmica als canvis que es produeixen en tot moment.
Els robots submarins poden treballar en entorns de risc i són capaços, per exemple, de recuperar una caixa negra en el fons de la mar.
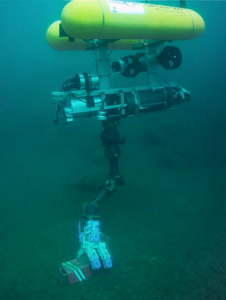 En tot cas, és evident que la relació amb el Mare Nostrum comença a ser molt intensa, a l’empara de les activitats d’investigació en el context de la robòtica submarina. Si en RAUVI es realitzen els experiments finals a la Costa Brava; en TRIDENT, l’avaluació final davant la CE té lloc a la base naval de Sóller (Mallorca). Per a tots dos experiments es tria com a context la cerca i recuperació de la caixa negra d’una aeronau situada al fons marí. Òbviament, la solució tecnològica demostrada en TRIDENT va molt més enllà que la realitzada amb RAUVI. A banda d’una mecatrònica més avançada, en TRIDENT es va aconseguir un progrés major en els nivells d’autonomia del sistema complet. Això facilita, en gran manera, la robustesa de les accions del sistema. TRIDENT va rebre l’avaluació final d’excel·lent per la CE, gràcies als resultats obtinguts i a la demostració final realitzada. Així, l’execució en condicions reals de la cerca i recuperació d’una caixa negra, amb l’autonomia més grau mai demostrada, constitueix una fita en la història de la tecnologia recent (vegeu la imatge adjunta).
En tot cas, és evident que la relació amb el Mare Nostrum comença a ser molt intensa, a l’empara de les activitats d’investigació en el context de la robòtica submarina. Si en RAUVI es realitzen els experiments finals a la Costa Brava; en TRIDENT, l’avaluació final davant la CE té lloc a la base naval de Sóller (Mallorca). Per a tots dos experiments es tria com a context la cerca i recuperació de la caixa negra d’una aeronau situada al fons marí. Òbviament, la solució tecnològica demostrada en TRIDENT va molt més enllà que la realitzada amb RAUVI. A banda d’una mecatrònica més avançada, en TRIDENT es va aconseguir un progrés major en els nivells d’autonomia del sistema complet. Això facilita, en gran manera, la robustesa de les accions del sistema. TRIDENT va rebre l’avaluació final d’excel·lent per la CE, gràcies als resultats obtinguts i a la demostració final realitzada. Així, l’execució en condicions reals de la cerca i recuperació d’una caixa negra, amb l’autonomia més grau mai demostrada, constitueix una fita en la història de la tecnologia recent (vegeu la imatge adjunta).
En l’actualitat hem de destacar, a més de la signatura d’un conveni de cooperació amb el CERN (2018), la concessió, per part de la Generalitat Valenciana, d’un projecte d’infraestructures, finançat per la UE a través dels seus fons regionals (FEDER). Això ha donat lloc al projecte CIRTESU (2018-20), amb la creació d’un consorci format per tres grups d’investigació de l’UJI i l’Institut d’Aqüicultura de Torre de la Sal (IATS). Liderat per l’IRS-Lab, aquesta nova infraestructura és única a la Comunitat Valenciana. L’edifici construït en una parcel·la de prop de 500 m² al campus de l’UJI, alberga un tanc d’aigua amb un volum de 480.000 m³. Ja s’hi han realitzat actualment els primers experiments de robòtica submarina. Les possibilitats de col·laboració cientificotecnològica que s’obrin ara són immenses, i ja s’ha posat en marxa un nou projecte europeu de l’H2020 (El-Peacetolero), amb participació de l’IRS-Lab, i que en els pròxims quatre anys donarà una visibilitat més que notable a l’UJI a escala internacional.

Pedro J. Sanz
Catedràtic de Ciència de la Computació i Intel·ligència Artificial, Universitat Jaume I
Bio