Esta es la historia reciente de cómo unos pocos investigadores, ilusionados por mejorar la sociedad en la que viven, acaban generando un impacto positivo de interés para la comunidad científica, en contacto directo con nuestro Mare Nostrum, desde la Universitat Jaume I (UJI) en Castellón. Si la UJI se funda en 1991, una década después se pone en marcha lo que sería el núcleo del grupo IRS-Lab. Inicialmente, la línea de trabajo se orientaba hacia las interfaces hombre-máquina por un lado, y por otro hacia la robótica de servicios.
Durante 2007 se organiza en Roma el congreso más importante del mundo en el contexto de robótica (ICRA’07). En un encuentro casual del que subscribe con un colega entrañable de la Universidad de Girona, investigador entusiasta en el desarrollo de nuevos vehículos submarinos, cristaliza una colaboración en el contexto de la robótica submarina que no ha cesado desde entonces. Así, en 2008, presentamos una propuesta conjunta al Ministerio, y coordinada por el que subscribe, que sería financiada para el trienio 2009-2011. Este primer proyecto, llamado RAUVI, sería el núcleo para impulsar una propuesta europea al séptimo programa marco, que resultó evaluada positivamente (FP7-TRIDENT). Una estancia de investigación en Italia fue determinante para conseguir el apoyo de algunos de los investigadores de más reconocido prestigio en este contexto, y así impulsar la propuesta europea que daría lugar a TRIDENT. Al final, con un consorcio muy potente de cuatro países (España, Italia, Portugal y Reino Unido) este proyecto, liderado por el que subscribe desde el IRS-Lab, estuvo activo desde 2010 hasta el 2013.
Hay que decir que, en esencia, tanto RAUVI como TRIDENT exploran vías de progreso en la misma dirección: el denominado problema de “búsqueda y recuperación”, inyectando el conocimiento adecuado y desarrollando las tecnologías necesarias para obtener un nuevo vehículo de intervención con la mayor autonomía posible. Para poder tomar sus propias decisiones, el vehículo de intervención debe garantizar la percepción adecuada de su entorno, en cualquier circunstancia, y ser capaz de reaccionar de forma dinámica a los cambios que se producen en todo momento.
Los robots submarinos pueden trabajar en entornos de riesgo y son capaces, por ejemplo, de recuperar una caja negra en el fondo del mar.
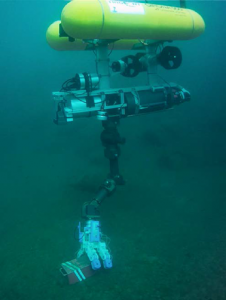
En todo caso, es evidente que la relación con el Mare Nostrum comienza a ser muy intensa, al amparo de las actividades de investigación en el contexto de la robótica submarina. Si en RAUVI se realizan los experimentos finales en la Costa Brava, en TRIDENT, la evaluación final ante la CE tiene lugar en la base naval de Sóller (Mallorca). Para ambos experimentos se elige como contexto la búsqueda y recuperación de la caja negra de una aeronave situada en el fondo marino. Obviamente, la solución tecnológica demostrada en TRIDENT va mucho más lejos que la realizada con RAUVI. Aparte de una mecatrónica más avanzada, en TRIDENT se consiguió un progreso mayor en los niveles de autonomía del sistema completo. Esto facilita en gran medida la robustez de las acciones del sistema. TRIDENT recibió la evaluación final de excelente por la CE, gracias a los resultados obtenidos y a la demo final realizada. Así, la ejecución en condiciones reales de la búsqueda y recuperación de una caja negra, con la mayor autonomía jamás demostrada, constituye un hito en la historia de la tecnología reciente (véase la imagen adjunta).
En la actualidad, hemos de destacar, además de la firma de un convenio de cooperación con el CERN (2018), la concesión por parte de la Generalitat Valenciana de un proyecto de infraestructuras financiado por la UE a través de sus fondos regionales (FEDER). Esto ha dado lugar al proyecto CIRTESU (2018-20), con la creación de un consorcio formado por tres grupos de investigación de la UJI y el Instituto de Acuicultura de Torre de la Sal (IATS). Liderado por el IRS-Lab, esta nueva infraestructura es única en la Comunidad Valenciana. El edificio construido en una parcela de cerca de 500 m2, en el Campus de la UJI, alberga un tanque de agua con un volumen de 480.000 m3. Ya se han realizado, a fecha de hoy, los primeros experimentos de robótica submarina. Las posibilidades de colaboración científico/tecnológica que se abren ahora son inmensas, y ya se ha puesto en marcha un nuevo proyecto europeo del H2020 (El-Peacetolero), con participación del IRS-Lab, y que en los próximos cuatro años dará una visibilidad a la UJI más que notable a nivel internacional.

Pedro J. Sanz
Catedrático de Ciencia de la Computación e Inteligencia Artificial, Universitat Jaume I
Bio